
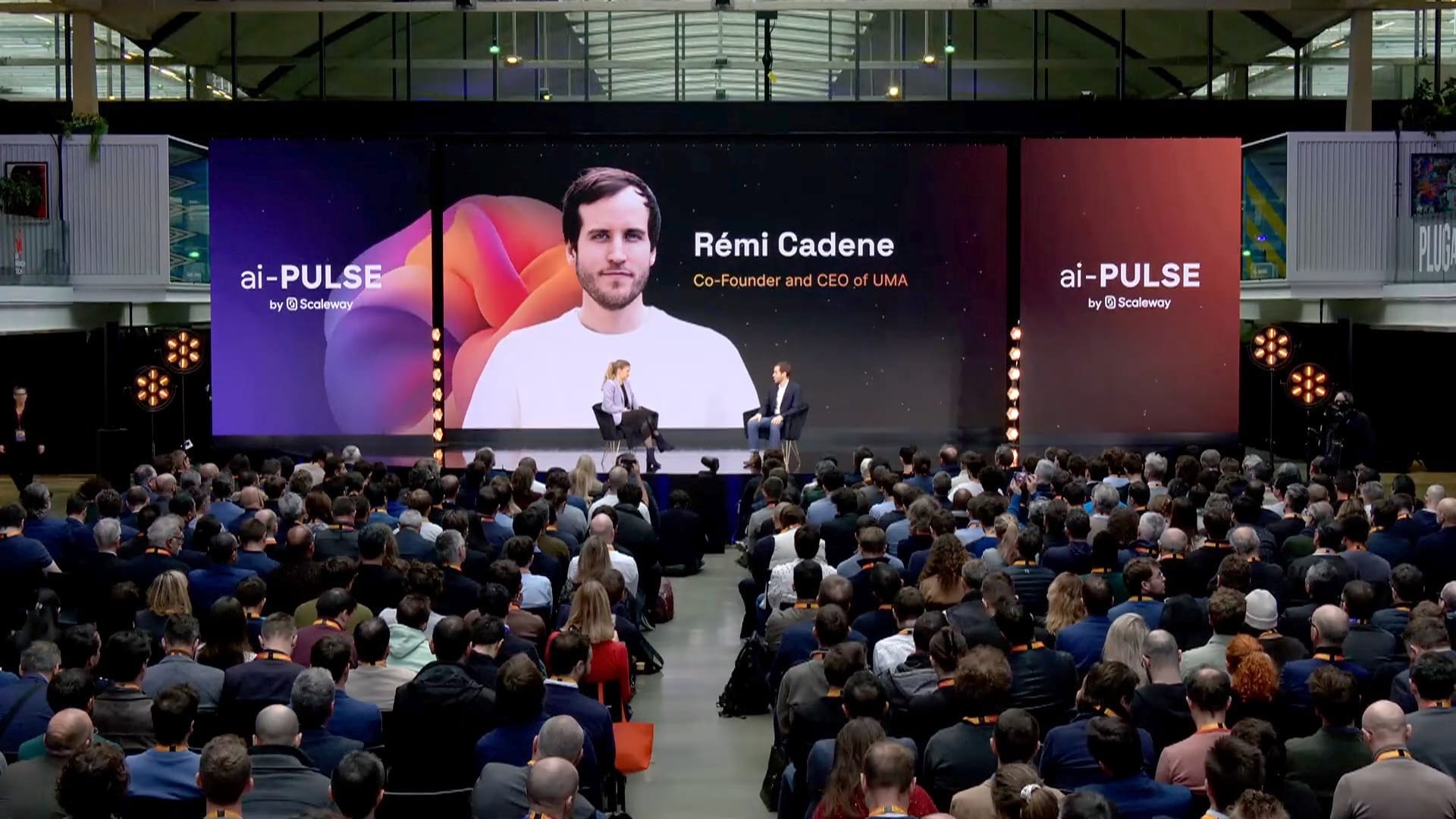
When Remi Cadene announced the launch of UMA earlier this month, his phone started buzzing with messages from former colleagues in California. "Even my friends in Silicon Valley were messaging me seeing UMA over the news," he recalled during a recent appearance at the aiPulse conference in Paris. "Incredible, and I'm grateful for all the support, all the energy and all the visibility worldwide."
The attention is hardly surprising. Cadene spent several years at Tesla helping develop the AI systems behind Autopilot and the company's humanoid robot, Optimus. More recently, he worked at Hugging Face, where he led the development of LeRobot, an open-source library that has become essential infrastructure for robotics worldwide.
Now he has taken all that experience and planted it firmly in European soil, launching what he believes will be the next great robotics company.
UMA (Universal Mechanical Assistant) emerged from stealth on December 1st with Cadene and three other co-founders, a team that one humanoid robotics news site dubbed "The European Robotics 'Supergroup'." They are backed by an impressive roster of investors, including Greycroft, Relentless, and Unity Growth, alongside AI luminaries such as Yann LeCun, Olivier Pomel, and Thomas Wolf.
Cadene believes that Europe is the ideal place to establish a humanoid robotics company, offering both talent and opportunities.
"We are convinced that Europe is the best market for this new technology, and that's something that not a lot of people are aware of," he said at the conference. The argument rests on demographics and industrial structure: "In Europe, we have a historic industrial network. So we are a lot of companies in the industry, and we have very highly qualified people, but an aging society. So there is a critical need for automation, and it's on the mind of all the C-levels in major companies doing business in Europe."
The Mission
UMA was officially established in Paris in September 2025 with an explicit mission to develop AI and robotics that shape a new economic and societal era.
The company's vision centers on building general-purpose mobile and humanoid robots with human-level dexterity and a deep understanding of the physical world. Unlike research-focused initiatives, UMA emphasizes building intelligent robots that enhance quality of life through practical, real-world deployment rather than proof-of-concept demonstrations.
The company's strategic positioning reflects a pragmatic approach to addressing urgent global challenges: structural labor shortages, rising operational costs, and the need for manufacturing resilience. Market analysts project that the humanoid and mobile robotics market will reach $243 billion by 2035 and exceed $5 trillion by 2050, with Europe capturing over 20% of this market through specialization in high-value-added solutions.
UMA's founding reflects European strategic ambitions to establish indigenous robotics capabilities competitive with dominant U.S. and Asian players. This positioning aligns with broader European industrial policy objectives around digital sovereignty and technological independence.
But that's certainly no guarantee of success. No doubt, most of the world either looks to China as the frontrunner, or Cadene's former employer, Tesla, and its Optimus robots as the most likely challenger.
Lessons from the Road
Of course, Cadene had a ringside seat at Tesla.
Cadene holds a PhD in Computer Science and Machine Learning from Sorbonne University and completed postdoctoral research at Brown University (Computational Neuroscience). His technical background spans both deep learning research and practical deployment at scale.
His path to founding UMA began on the streets of California, where he helped teach Tesla's vehicles to navigate a world full of unpredictable humans. That experience, he says, translates directly to humanoid robotics in ways many people don't appreciate.
"Driving is a subset of human behavior, so it's extremely social," he explained. "You interact on the road with a lot of people every day. You need to handle some very complex situations, and you don't just follow the rules. There are always edge cases, and you need to make a very fast decision, so it's a super difficult problem."
The breakthrough, according to Cadene, came when the technology matured to the point where it could generalize beyond driving. "We reach a point where we develop a technology so general that it can be applied to self-driving, but also to humanoid robots learning from people," he said. The key ingredient is human data. "We need to learn from human data. So for self-driving, we had a lot of data available, and that's how we are able to handle the edge cases."
Throughout his commercial work, he also continued to publish research. His research contributions have generated over 1,051 academic citations focused on deep learning architectures, visual question answering, and multimodal fusion methods. Notably, his work on "Mutan: Multimodal Tucker Fusion for Visual Question Answering" and "Rubi: Reducing Unimodal Biases for Visual Question Answering" demonstrates expertise in addressing fundamental challenges in AI robustness and interpretability.
A couple of years ago, Cadene left Tesla for Hugging Face, the New York City-based open-source AI platform company that was launched by French founders. Cadene served as principal researcher and co-founder of LeRobot, an open-source robotics platform that democratized access to robot learning tools and datasets. His GitHub profile shows 99 contributions in the past year, actively maintaining core robotics infrastructure.
In October 2024, LeRobot partnered with The Robot Studio, another French robotics company, for the development of the SO-100 arm, a robotic arm that only cost $100. The Robot Studio was co-founded by Robert Knight, a future co-founder of UMA. The following spring, Nvidia chose Hugging Face to host its GR00T N1 open-source AI model for humanoid robots.

Earlier this year, Cadene was part of the team at Hugging Face that led the acquisition of a small French robotics hardware startup called Pollen Robotics. Pollen's Reachy robot was primarily a tool for researchers, but Hugging Face wanted to make it more generally available in tandem with its open-source robotic platform.
About That Robotics 'Supergroup'
The four co-founders represent a carefully curated blend of AI research leadership and practical robotics engineering:

Simon Alibert - Chief Technology Officer
Pictured above with Cadene at Hugging Face, at 34 years old, Alibert co-founded the LeRobot project at Hugging Face. His GitHub profile demonstrates 330 contributions in the past year with a primary focus on the LeRobot repository. LeRobot represents a significant open-source contribution to robotics, providing standardized datasets, training pipelines, and simulation environments that democratize access to robot learning infrastructure previously available only to well-funded research labs.
Alibert's technical contributions span multiple gym environments for different robot platforms (ALOHA, XArm, PushT), demonstrating practical engineering expertise in building training infrastructure for diverse robot morphologies. His role as CTO indicates UMA's commitment to building software infrastructure as sophisticated as its hardware systems.
Pierre Sermanet - Chief Science Officer
At 44 years old, Sermanet brings two decades of deep learning and robotics research experience, having served as a co-founder of the robotics team at Google DeepMind and as a researcher at Google Brain. His academic influence is substantial, with his seminal paper "Going Deeper with Convolutions" (the GoogLeNet architecture) receiving 71,283 citations and becoming foundational to modern deep learning. His work on pedestrian detection and traffic sign recognition established early applications of convolutional neural networks to practical problems.
Sermanet's patent portfolio reveals the core technical direction of his recent work. His Google patents demonstrate specialization in robotic perception and control:
- US11887363B2 (granted January 2024): "Training Deep Neural Network Models to Generate Rich Object-Centric Embeddings of Robotic Vision Data" - This patent addresses how robots can learn rich visual representations that enable discrimination of subtle object attributes, essential for manipulation tasks.
- US11453121B2 (granted September 2022): "Mirror Loss Neural Networks" - Describes training methods for generating embeddings invariant to viewpoint, occlusions, motion blur, and lighting, enabling robots to recognize and interact with target objects robustly.
- US11559887B2 (granted January 2023): "Optimizing Policy Controllers for Robotic Agents Using Image Embeddings" - Details methods for training robot controllers using only raw video demonstrations without explicit joint-level data, enabling learning from human demonstrations at scale.
- US20230182296A1 (published June 2023): "Training and/or Utilizing Machine Learning Models for Use in Natural Language Based Robotic Control" - Demonstrates integration of natural language with robotic control across multiple training datasets, foundational for instructable robots.
- US11580360B2 (granted February 2023): "Unsupervised Detection of Intermediate Reinforcement Learning Goals" - Shows methods for automatically decomposing complex robotic tasks into subtasks, advancing hierarchical robot learning.
Robert Knight - Chief Robot Officer
At 49 years old, Knight represents the deepest robotics expertise on the team with over 25 years of experience specializing in humanoid robot design. His career spans positions at Nvidia and Maxon Motor, with consulting engagements across the robotics industry. Knight founded The Robot Studio and established himself as a leading advocate for accessible, open-source robotics design.
Via Rob Knight: “This is the most popular of the Youtube videos posted on the V1 #DexHand #open #robot #hand – it’s not my favourite personally but it’s got 30k likes from 735k views so clearly what do I know? :-)”
Knight's most recent contributions include two significant open-source projects:
- SO-100 Robotic Arm: Designed to cost one-third the price of previous comparable systems while delivering twice the capabilities. This design demonstrates engineering optimization for manufacturability at scale while maintaining technical performance.
- HOPEJr Humanoid: An open-source humanoid robot platform reflecting Knight's design philosophy of democratizing robotics through accessible designs.
Earlier work on the ECCERobot project (circa 2005) created anthropomimetic robots with anatomically accurate human-like structure, including realistic spinal discs and scapula motion, decades before such designs became common. This historical perspective informs UMA's approach to human-robot collaboration through biomimetic design principles.
In a recent extensive interview with Humanoid.guide, Knight articulated a sophisticated analysis of the robotics field's current bottlenecks, particularly emphasizing dexterous manipulation as the critical limiting factor for humanoid robots. His insights on tendon-based actuator systems, the need for integrated tactile sensing, and the absence of adequate simulation environments for hand design reflect a deep understanding of engineering challenges at the frontier of practical robotics.
| Founder | Patent Portfolio | Academic Citations | Key Projects |
|---|---|---|---|
| Pierre Sermanet | 7+ active Google patents on robotic vision, control, and learning | 65,000+ (Going Deeper); 974+ (Time-Contrastive Networks) | RT-2 Vision-Language-Action Models; Open X-Embodiment |
| Rémi Cadène | Tesla/Optimus background (limited public patents) | 1,051+ on deep learning architectures | LeRobot co-founder; Visual Question Answering; Explainability |
| Simon Alibert | LeRobot open-source infrastructure | Community-driven contributions | LeRobot training environments and datasets |
| Robert Knight | Likely patent portfolio (private consulting) | Open-source robotics (SO-100, HOPEJr) | Humanoid design; Dexterous manipulation |
Dual Robot Platform Strategy
UMA is pursuing a complementary two-platform approach that reflects a pragmatic understanding of diverse industrial needs:
Mobile Industrial Robot with Dual Arms
The first platform targets structured industrial environments (warehouses, logistics centers, assembly lines) where environmental predictability enables high-precision automation. This robot integrates two manipulator arms for complex material handling tasks historically performed manually, such as loading/unloading boxes, sorting packages,and assembly operations. The design emphasizes precision and repeatability for deterministic tasks.
Compact Humanoid Robot
The second platform addresses unstructured, human-centric environments requiring adaptability and proximity collaboration with human workers. This design leverages humanoid morphology to navigate spaces designed for humans, enabling deployment in environments from hospitals to service sectors without infrastructure modifications.
This dual-platform approach strategically addresses the full spectrum of near-term deployment opportunities while building a cohesive technical foundation. Structured environments provide faster validation and revenue generation, while human-centric applications represent the longer-term market opportunity.
Core Technical Capabilities
The co-founders' research contributions directly inform UMA's technical direction:
Vision-Language-Action Models
Sermanet's RT-2 vision-language-action models and related research enable robots to understand multimodal instructions combining visual perception with language understanding. This capability directly supports the natural language control patent, allowing workers to instruct robots using natural conversational commands rather than complex programming.
Object-Centric Robotic Vision
The patented deep neural network approaches for generating rich object-centric embeddings enable robots to recognize objects with nuanced understanding of subtle visual attributes, a feature that is critical for manipulation tasks requiring discrimination between similar items. This technology would enable the mobile industrial robot to handle diverse box shapes, weights, and contents.
Policy Learning from Demonstrations
Patents on optimizing policy controllers using image embeddings enable robots to learn complex behaviors from human demonstrations without explicit programming. Combined with hierarchical reinforcement learning approaches, this enables practical deployment of manipulation skills across different robot platforms and tasks.
Embodied AI Infrastructure
The LeRobot platform, co-created by Cadène and Alibert, provides open-source tools for reproducible robot learning, including standardized datasets, training pipelines, and simulation environments. This infrastructure becomes critical for UMA's ability to scale development across multiple robot configurations and deployment environments.
The Dexterity Problem
Ask Cadene what keeps him up at night, and the answer is surprisingly intimate: hands. Specifically, recreating the extraordinary capabilities of the human hand in robotic form.
"The most difficult challenge to me is dexterity," he said at aiPulse. "We don't realize how incredible our own hands are. We are able to be extremely dexterous, to manipulate very thin objects, to manipulate eggs, to not crush the eggs. So we need sensors. And we are also able to manipulate a diversity of objects of grasp. We constantly improve our way of our gestures, and we don't even need to think about it. And we need to develop the same thing for robots."
To tackle this challenge, Cadene recruited Knight as a co-founder. "I'm very lucky, because one of my co-founders is Rob Knight, and he has been developing robotic hands all his life, like even before university, actually," Cadene said. "He has open-sourced the most dextrous and affordable version of hands. So we take this problem very seriously."
Beyond the Demo
The robotics industry has long been plagued by a gap between impressive demonstrations and real-world reliability. Cadene acknowledges the challenge but sees evidence that the field is finally crossing a threshold.
"We are seeing a lot of impressive demos of a few minutes, and they are improving at very high pace," he said. "But most importantly, we are seeing now demo videos for hours of robots automating tasks in real-world environments, tasks such as folding clothes, making a latte, and folding a box for logistic packing. And so it's becoming possible."
UMA's approach centers on what Cadene calls "self-improving robotic intelligence"—systems that get better through practice, much like humans do. "We are focused on software, AI in the brain of the robots, and we have the ingredients to be able to learn from people and to have the self-improving robots that like us, increase our ability to do tasks just by practicing," he explained.

Investors and Capital Structure
UMA completed a significant first-round funding at an undisclosed valuation from a consortium of prominent venture capital firms and strategic investors. The funding participants include:
Lead Venture Capital Investors: Greycroft, Relentless, Unity Growth, >Commit, Factorial, ALM Ventures, and Drysdale
Strategic Angel Investors and Technical Advisors:
- Yann LeCun (Meta Chief AI Officer, Turing Award recipient) - Provides strategic guidance on deep learning research directions
- Xavier Niel (Free founder, significant French technology investor) - Represents European industrial and capital network access
- Guillaume Lample (Mistral AI co-founder) - Brings expertise in large language models relevant to embodied AI
- Olivier Pomel (Datadog CEO) - Enterprise software and infrastructure expertise
- Thomas Wolf (Hugging Face co-founder) - Direct continuity with LeRobot open-source ecosystem
- Soumith Chintala (PyTorch co-creator) - Deep learning infrastructure and community leadership
- Nicolas Rosberg (Former F1 driver) - Technology investment portfolio and high-performance systems background
The Roadmap
UMA plans pilot programs next year in three initial sectors:
- Logistics: Warehouse automation and package handling
- Manufacturing: Assembly line automation and material handling
- Healthcare: Potential applications in logistics and support tasks
These pilot programs serve dual purposes: validating technological performance in real operating environments and establishing initial customer relationships and revenue streams while scaling technology development.

Why Europe?
Perhaps the most contrarian element of UMA's strategy is its geographic bet. In an industry where conventional wisdom points toward Silicon Valley or Shenzhen, Cadene is adamant that Europe offers unique advantages.
Europe also offers something that often gets overlooked in the global tech talent wars: remarkably affordable access to world-class education. "Personally, I paid €600 for my master's degree," he noted. "People don't realize how affordable the high-quality education is, he added, pointing out that this creates a deep bench of talent across the continent.
The company is also committed to building its own hardware and controlling its supply chain within Europe, a strategic decision driven by the need for robots that are safe, lightweight, affordable, and producible at scale.
Of course, none of this will be easy. UMA faces significant execution challenges. Topping a long list, the company will have to prove it can manufacture at scale, demonstrate reliability and safety in demanding industrial environments, secure substantial investment for manufacturing infrastructure and continued R&D, face eventual competition from global players, and build a massive supply chain.
But Cadene argues that those goals will align with the needs and priorities of the European market.
"We are focused on software, on the brain of the robots, and we have the ingredients to be able to learn from people and to have self-improving robots that, like us, increase our ability to do tasks just by practicing," he said. "But in parallel, what's extremely important is that we also design our own hardware. And the reason why is that we are seeing an evolution in the robot design. We need robots that are safe by design, so lightweight, and that can be affordable, cost-efficient, and produced at scale. And so this means that we need to own and control a supply chain, our own supply chain in Europe for the European market."



{kind=link}